The 2025 MDSGC Student Research Symposium was held on Monday, August 4, beginning at 8 a.m. EDT.
This year’s event showcased presentations by student interns and researchers working at varied institutions across Maryland, including: The Bryn Mawr School, Capitol Technology University, Hagerstown Community College, Johns Hopkins University, Morgan State University, NASA, Space Telescope Science Institute, Towson University, University of Maryland Baltimore County, University of Maryland College Park, and University of Maryland Eastern Shore.
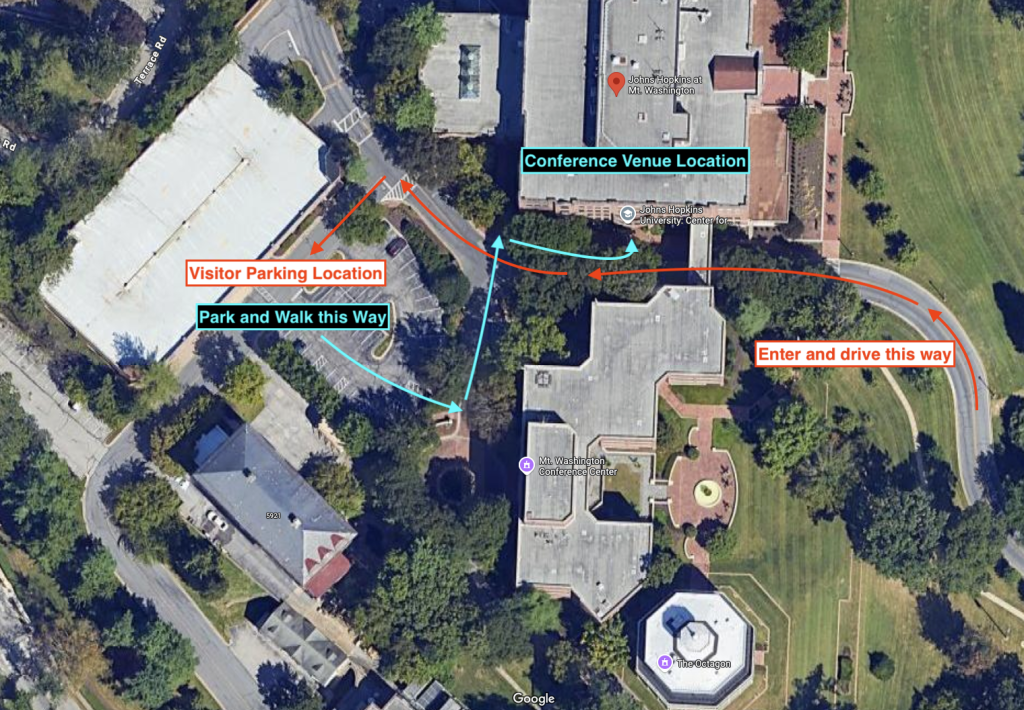
The venue was the Mt. Washington Conference Center in Baltimore, MD. For GPS navigation, head for “Johns Hopkins At Mt. Washington, Smith Avenue, Baltimore, MD” (link) and park in the nearby visitor parking lot/garage. Below is an image from Google showing the relative locations of parking and the conference venue:
The event schedule and full online program are below.
Symposium Schedule
Oral Presentation Session I, 9:00 – 10:40 a.m.
The Space Flight Operations Training Center at Capitol Technology University recently underwent multiple major additions, including the modern Dell servers, ten new virtual controllers with the latest Galaxy release installed, and ten total virtual spacecraft. This presentation will cover the process of installing those upgrades, reconfiguring the database to work with the new setup, and testing the system to ensure it is ready to be used by students in the upcoming fall semester.
An often overlooked part of every good research project, invention, or product, is the cost. Before the public can benefit from a new invention, they must consider the price tag and weigh it against the other bills demanding of them this month. Within the current economic landscape, the cost of things is often more important than anything else, despite a commodities’ possible overwhelming benefits. For a solution such as the Centrifugal Mirror Fusion Experiment (CMFX), that seeks to provide a pathway for clean energy through nuclear fusion, getting cost estimates that satisfy both investors and everyday consumers alike is essential to reaching this future. Using python and github, a cost modeling algorithm was developed for the machine, assessing certain physical property changes of the fusion reactor against the cost of electricity and overall cost of running a nuclear fusion power plant while supplying energy to customers.
What if I told you that one of the largest temperature gradients in the known universe was right here in Maryland? Well it is true, at the Centrifugal Mirror Fusion Experiment (CMFX) we have supersonically rotating hot plasma inches away from liquid helium superconducting magnets. CMFX expands on the established concept of the magnetic mirror, implementing a radial electric field with a central electrode that causes the confined plasma velocity component to point in the azimuthal direction, thus stabilizing and heating the plasma. Magnetic diagnostics are essential to understanding the interactions between the plasma and the centrifugal mirror. For my summer internship, with input from my mentor and the CMFX team we constructed Bz probes which consisted of an array of three loops. Each loop has 30 turns and a measured cross-sectional area of 6.5 × 10-5 m2. The probes are then mounted on a window exterior to the vacuum vessel. Each probe was shielded and connected to a digitizer/oscilloscope for data acquisition. The signals are then filtered, integrated, and detrended to produce ∆B graphs. FFT and spectral analysis were implemented to identify sources of noise within the ∆B signals. This builds on the previous research from last year’s internship by improving the signal-to-noise ratio using shielding techniques and by employing Python within Jupyter Lab for data analysis. Preliminary results from the Bz probes suggest ∆B signals on the order of 102 G near mid-plane.
This country thrives off the inventions, technical systems, and aid of various STEM careers such as doctors, engineers, and chemists. Due to the reliance on these fields, the STEM Center for Education and Outreach at USNA aims to increase the number of students pursuing STEM related subjects and careers. They make this goal possible through the help of USNA faculty, Midshipmen, and interns providing fun and educational modules, to be taught both directly to students and teachers, fostering their interest in various STEM fields.
We tried to calculate the speed of light by using Roemer’s technique of observing one of Jupiter’s moons’ eclipses at different times of the year. By observing Ganymede’s immersions in May and August, we were able to calculate the difference in time and divide it by the difference in distance between Jupiter and Earth in the spring and fall to find the speed of light.
We present the outcomes of an observing campaign to obtain HI spectra of supernova host galaxies from the Democratic Samples of Supernovae (Stahl et al. 2021) using the L-Band receiver on the Green Bank Telescope. The data was collected as part of a project of the Undergraduate ALFALFA Team to generate a template Baryonic Tully-Fisher Relation by combining the GBT sample with an archival sample of 21-cm spectra for a total sample of 160 galaxies with accurate, redshift-independent distance estimates. Here we present our data analysis process and our BTFR result in comparison to the Schombert et al. conclusions.
Driven by a passionate group of students, engineers, and research scientists, the Johns Hopkins University Cube Satellite Club (JHU CubeSat Club) was formed in 2023 with the goal of linking engineers and scientists with undergraduate students who would like to gain hands-on experience in space science and engineering. The JHU CubeSat Club’s inaugural project is focused on the development of an amateur radio ground station that is remote accessible, up-link capable, and designed to support future and current CubeSat missions, including the University of Colorado Boulder (CU Boulder) Supernova remnants/Proxies for Reionization/ and Integrated Testbed Experiment (SPRITE) CubeSat projected to launch in late 2025. In the short term, the club will provide mission communication command and control up-link, and science data down-link on behalf of its partner, CU Boulder. The long-term vision is to provide remote support for multiple missions, by allowing the station to be remotely accessed by other Federal Communications Commission (FCC) licensed partners/collaborators via the Internet. We foresee an opportunity to foster the development of a global network of up-link capable ground stations. Student involvement is integral to our mission at JHU CubeSat Club. We strive to be a bridge for undergraduate students to apply their theoretical knowledge to real world space missions. JHU CubeSat Club continues to give students the opportunity to delve deeper into areas that they have inclinations towards while also fostering an environment that encourages the exploration of different interests.
Group Photos, 10:40-11:00 a.m.
Oral Presentation Session II, 11:00 a.m. – 12:10 p.m.
This project focuses on characterizing the electrical conductivity of various samples of lunar regolith mixed with paraffin wax and CNT/CF (Carbon Nanotubes/Carbon Fibres) by using a combination of 2 and 4 point surface resistivity measurements. These tests take place at room temperature and at simulated lunar conditions in a thermal vacuum chamber.
Hello! My name is Logan Hurney, and I was an Intern at Wallops Flight Facility working with the Ground Operations team at NASA. This Internship was full of fun and exciting things from Rocket Launches, plane rides, and tours to load testing, wiring, and facilities operations. During this internship I was exposed to various valuable experiences, and each day was more exciting than the last!
In this talk I will outline my role, the duties that came with my job, and how NASA Goddard has shaped my career path..
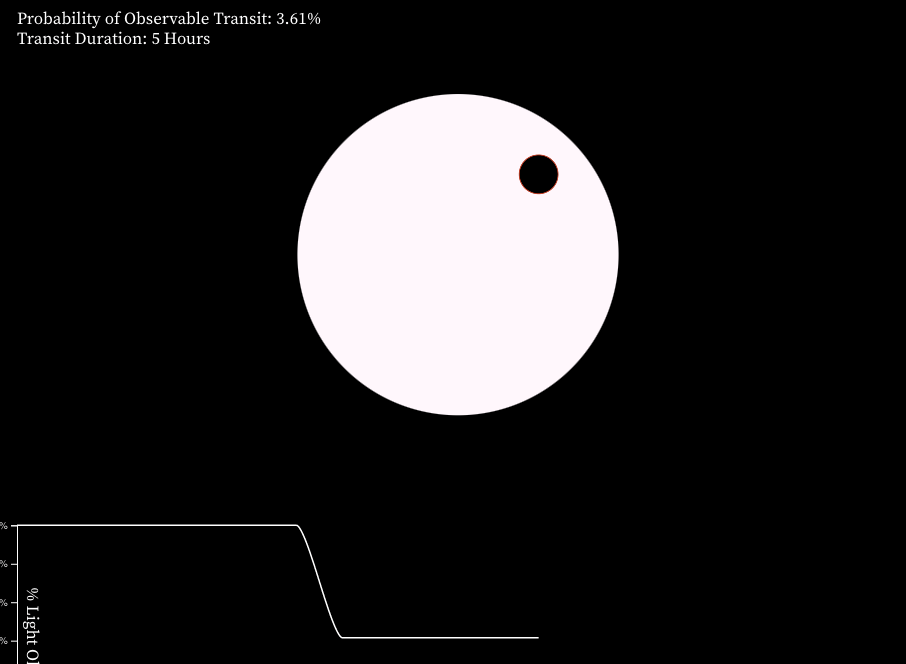
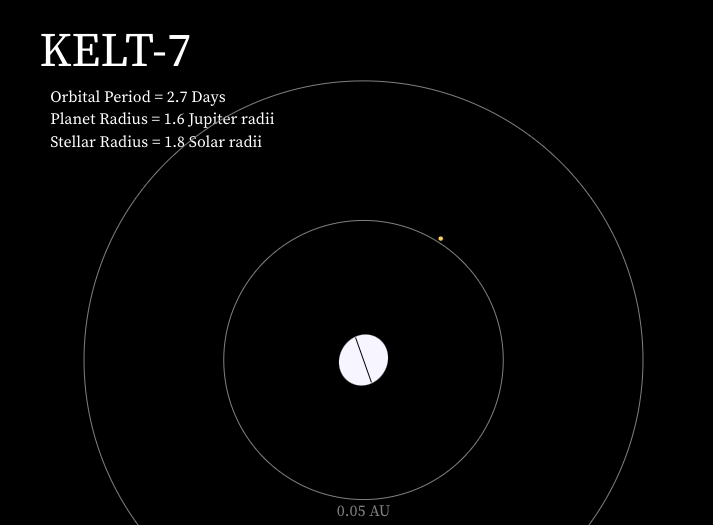
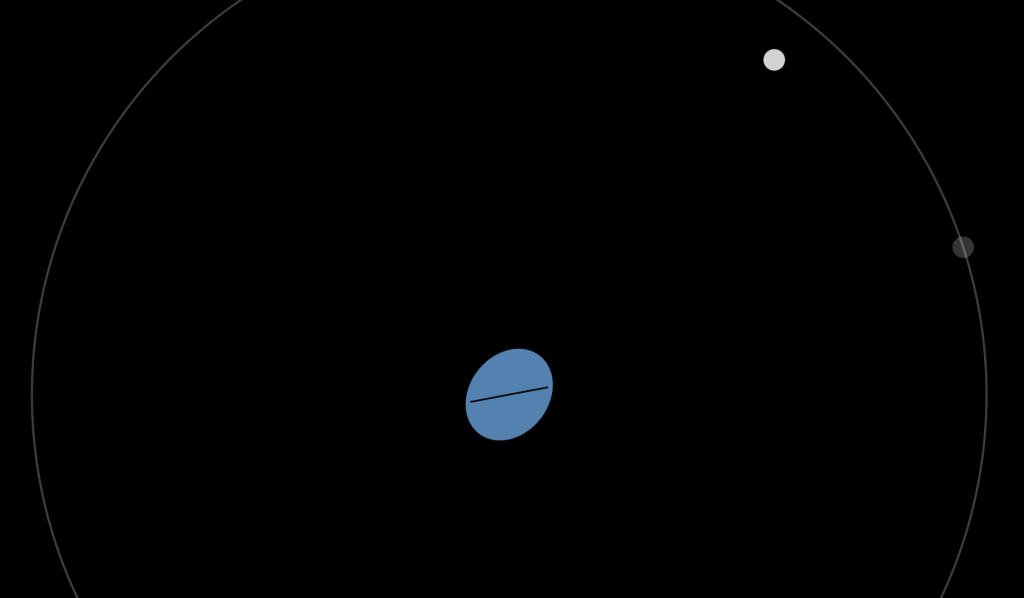
Dr Kielan Hoch will share her journey through academia as a women with a nontraditional background starting from her undergraduate time at Towson University, her graduate studies at UC San Diego, and her time as a Giacconi Fellow at the Space Telescope Science Institute. She will then share her PhD and current research area in Exoplanet studies and how she is pioneering space-based exoplanet science with the James Webb Space Telescope (JWST) and her involvement with the efforts to plan the future space telescope, Habitable Worlds Observatory (HWO) with which we hope to answer the question: are we alone?
Lunch and small group discussions, 12:10 – 1:00 p.m.
Oral Presentation Session III, 1:00 p.m. – 2:30 p.m.
This summer, I participated in a robotics internship at the University of Maryland Eastern Shore (UMES) under the auspices of the AIRSPACES (Autonomous Instrumented Robotic Sensory Platforms to Advance Creativity and Engage Students) project, funded by the Maryland Space Grant Consortium. The AIRSPACES project also has synergistic interfaces with the NASA-MSTAR funded DREAM (Developing Robotic Explorations with Agrobots and Moonbots) project ongoing at UMES. My work centered on autonomous navigation and system integration using the Agilex LIMO—a four-wheeled, multi-modal mobile robot equipped with LiDAR, a stereo depth camera, and onboard computing. Leveraging the Robot Operating System (ROS) framework, I explored robot mapping, localization, and navigation, and conducted simulated navigation tasks in the Gazebo environment. The move_base ROS package played a central role in enabling autonomous path planning and obstacle avoidance. In addition, I gained hands-on experience with soft robotics, assisting in mobile and robotic arm applications utilizing soft grippers. Together, the LIMO and soft robotic platforms provided a dynamic and engaging environment that deepened my understanding of robotics and autonomous systems.
NASA’s Artemis mission, a collaboration with commercial and international partners, aims to establish a sustained human presence on the Moon and apply the lessons learned to support future crewed missions to Mars. As part of this vision, sustainable food production is a critical research area.
Smart agriculture integrates advanced technologies to enhance crop productivity and quality while reducing manual labor through automation. FarmBot, an open-source robotic farming platform, can autonomously perform tasks such as planting, watering, and weeding. This project investigates FarmBot’s watering capabilities to support the growth of alfalfa (Medicago sativa) microgreens in Martian regolith simulant amended with varying concentrations of horse manure. The objective was to identify the soil mixture that yielded the greatest edible biomass. The 50% regolith simulant / 50% horse manure treatment produced the highest yield with a mean biomass yield of 18.15g, followed closely by the 70% regolith simulant / 30% manure mixture with a mean biomass yield of 15.13g.
A second experiment explored soil-less cultivation using aeroponics—a method where plant roots are suspended in air and misted with nutrient-rich water. Broccoli microgreens (Brassica oleracea) were grown in a Tower Garden FLEX automated vertical aeroponic system and treated with a kelp-derived foliar biostimulant at varying concentrations to evaluate its effect on edible biomass. Preliminary findings suggest potential benefits but require further trials to determine statistical significance and overall efficacy.
Manual methods for stand count and vigor assessments in agriculture are highly time-consuming and error-prone, particularly in large-scale cornfields. This presentation addresses the integration of robotics, computer vision, and artificial intelligence to develop an autonomous and scalable solution for accurate plant detection, counting, and health assessment. Utilizing an AgileX Scout Mini equipped with an Intel Real sense d435i camera, video segments were systematically collected at predefined intervals corresponding to 1/1000th of an acre. OpenCV and YOLOv8 algorithms were employed to ensure precise detection and tracking of individual plants across video frames, addressing challenges such as variable lighting, occlusions, and growth stage variations. Plant health was quantified using a vigor scoring system assessing morphology, stem strength, and color health. Stand count estimates achieved up to 96.67% accuracy when compared against the known seed application rate. The approach demonstrates good potential for practical agricultural applications including crop emergence assessment, early disease detection, growth rate tracking, and yield estimation. Future enhancements aim to integrate drone and satellite imagery for improved detection capabilities, multi-class identification, and expanded analytical functions such as weed and pest detection, disease classification, and cloud-based data processing.
Understanding the orbits of asteroids is crucial for assessing potential threats to Earth and other celestial bodies. For example, in 2024, an asteroid (2024 YR4) was identified that was initially thought to have a significant chance of impacting Earth. Although further research has shown that it will not hit Earth, there is still uncertainty about its potential to impact the Moon. This project focuses on identifying potential precovery events for such asteroids within archival data from the Transiting Exoplanet Survey Satellite (TESS). By developing a Python-based software pipeline, we cross-reference known asteroid orbital data from NASA’s Small-Body Database with TESS sector observations to determine whether asteroids were observed prior to their official discovery. The process involves querying candidate asteroids, retrieving TESS observation windows using the TESSCut API, and comparing these with discovery dates. Successful matches indicate potential for precovery events, which are instances where an asteroid was captured in images before its official discovery. Initial results show that the potential precovery rate with TESS data is approximately 5%, resulting in a total precovery estimate of up to 6500 objects. These precovery detections will provide additional data points to improve the orbit fitting process and confidence level in impact probability, contributing to planetary defense efforts.
During the last few months I have been working with the UMD’s Ballon Payload Program, gathering and processing data for submission to NASA’s science activation, updating and preparing ASIC and NSO, two balloon payloads that were designed to track radiation in the upper atmosphere. For this payload I have designed, printed and integrated a circuit board, integrated the ability to utilize a real time clock, barometer and easily save the data for analysis later. We are currently looking to integrate a scintillator and are preparing to test the payload on the high-altitude ballon flight on the 9th with a back up date of the 10th of August.
At the University of Maryland’s Space Systems Laboratory, I contributed to the development of VERTEX, a modular Mars rover platform designed to support advanced research in robotic mobility and autonomy. My work focused on robotics and control systems, including motion coordination and testing in dynamic environments. The ultimate goal of VERTEX is to serve as a mobile life support system for astronauts during planetary exploration, reducing their workload and enabling safer, more efficient surface operations.
The ~340-meter diameter Potentially Hazardous Asteroid (PHA) designated 99942 Apophis 2004 MN4 will make a historic close approach of Earth on April 13th, 2029, passing within ~32,000 km of Earth’s surface, just over 4,000 km closer than the distance of geosynchronous satellites. This is a once in 7500 years event that will be an exceptionally unique opportunity to observe planetary encounter effects on an asteroid. It is also a novel opportunity to collect imagery of a sizeable asteroid via a cubesat in Earth orbit, placing the mission within reach of a university team. Our Terrapin Engineered Rideshare Probe for Rapid-response asteroid Apophis Profiling, Tracking, Observing, and Reconnaissance (TERP RAPTOR) is an Earth-orbiting mission concept in which a 12U CubeSat built by University of Maryland students would perform a flyby of Apophis during the time surrounding its closest approach to Earth and collect visible and near-infrared imagery of the asteroid.