

The 2024 MDSGC Student Research Symposium was held on Friday, August 2, beginning at 8 a.m. EDT. The venue was the Mt. Washington Conference Center in Baltimore, MD. For GPS navigation, aim for “Johns Hopkins At Mt. Washington, Smith Avenue, Baltimore, MD” (link) and park in the nearby visitor parking lot/garage. Here is an image from Google showing the relative locations of parking and the conference venue:

This year’s symposium showcased presentations by student interns and researchers working at sites across Maryland. The cohort of presenters represented diverse institutions, including: Capitol Technology University, Hagerstown Community College, Morgan State University, NASA, Towson University, University of Maryland Baltimore County, University of Maryland College Park, and University of Maryland Eastern Shore.
The program follows.
2024 MDSGC Student Research Symposium
Oral Presentation Session 1, 9:00 – 10:20 a.m.
Saimah Siddiqui graduated in May 2024 with bachelor’s degrees in Aerospace Engineering and Mathematics from the University of Maryland, College Park. Her academic journey was notably shaped by her involvement in the Space Grant program, where she served as the Senior Launch Director for the Balloon Payload Program (BPP). This role provided her with invaluable hands-on experience and technical skills in aerospace technology.
Currently, Saimah is preparing to pursue a Master’s degree in Space Systems Engineering at Johns Hopkins University. With a strong foundation built through her recent education and leadership experiences in the Space Grant program, she is eager to advance her expertise and contribute to the field of space exploration and technological innovation.
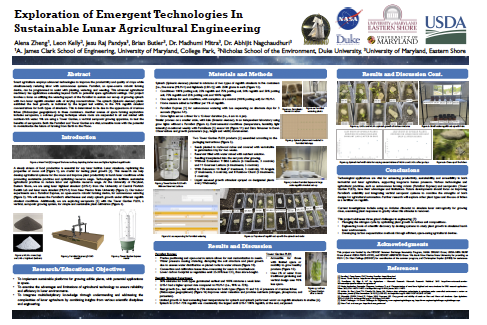
The objectives of NASA’s Artemis project are to “Go, Land, Live, and Explore,” representing a comprehensive approach to lunar exploration. “Go” is launching missions to the Moon, “Land” is safely landing astronauts, “Live” is establishing sustainable living conditions, and “Explore” is conducting scientific investigations to expand human presence on the Moon. To achieve “Live,” a lunar settlement must sustain itself to support ongoing exploration. Our project addresses the challenges of sustaining astronauts by examining the growth of food crops on lunar regolith simulants using space-saving technologies such as aeroponics (growing plants without soil, in which the roots are suspended in the air and misted with a nutrient-rich water solution) and farmbot (an open-source farming technology that combines robotics, automation, and software to facilitate precision farming in small-scale agricultural settings) for plant cultivation. In addition, we investigated the effects of two types of lunar regolith simulants: Lunar Highland Simulant 1 (LHS-1) and Mexico Lunar Mare 1 (MLM-1) on the growth of spinach (Spinacia oleracea) and kale (Brassica oleracea), utilizing various mixtures of regolith simulants infused with horse manure under controlled conditions of light and water. Our findings revealed that higher concentrations of regolith simulants supported better plant growth that could be attributed to the growing layer of yellowish-green lichen, Rhizocarpon geographicum, a symbiotic organism composed of a fungus and an alga. This study highlights the potential of regolith-based substrates and symbiotic organisms to support crop cultivation in the lunar environment.
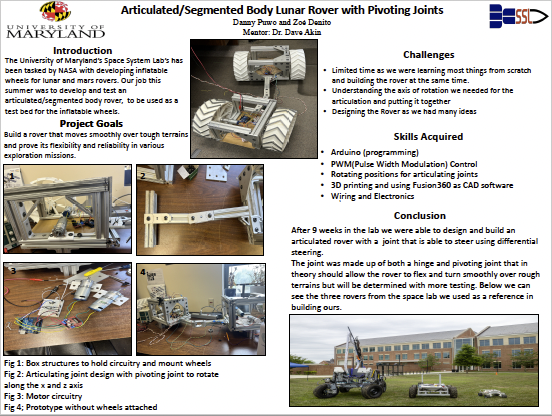
During the internship at University of Maryland College Park we created an Articulating Rover as a “body” or testbed for the BIG Ideas project and future projects. The BIG Ideas project is a program where students work with NASA to create innovative and groundbreaking projects. They are currently designing wheels for the Lunar and Martian rover(s), using CAD and testing wheels for traction along with an inflatable devicel, with grousers, to help the rover cover more ground. The Articulating Lunar Rover (Luna) consists of two boxes and rotating joints made of aluminum, 3D printed Models of the BIG Ideas inflatable wheel designs, and a circuit to actuate the wheels. The Arduino Uno is the main part of the circuit which is connected to a joystick (which is tethered to the Rover), and four motors for rotating the wheels. The process of building the project is very rewarding, even though there were some time constraints and limited resources, we gained a lot of experience in programming with an Arduino, and circuitry.
Precipitation’s global distribution, anomaly, and extremes are fundamental in nature. There are three sequential questions to determine the precipitation climatology: Is it precipitating? What is the phase of the precipitation? What is the amount of precipitation? The response to these three questions comes with uncertainty. The oceans cover over 70% of Earth’s surface, therefore satellite-based precipitation products are the sole source of global precipitation mapping. NASA’s gauge-adjusted multi-satellite product, IMERG, has been operated and funded by the Global Precipitation Measurement (GPM) mission and is the most used precipitation product globally. The poor coverage of ground-based precipitation measurements across the land surface is one of the key reasons for the high demand for external precipitation resources. NOAA’s Multi-Radar Multi-Sensor (MRMS) with high spatial and temporal resolution precipitation mapping using national weather radar and multiple gauge platforms, was adopted by the GPM program as a validation product for satellite-based precipitation estimates from IMERG.
Both IMERG and MRMS have their own precipitation phase algorithms. MRMS’s deterministic algorithm relies on High-Resolution Rapid Refresh (HRRR) air and wet-bulb temperature forecast, while IMERG’s probabilistic algorithm uses European Reanalysis (ERA5) wet-bulb estimates. This study aims to evaluate these two algorithms utilizing data from a three-winter-long field campaign in Connecticut. The campaign included an All-In-One (AIO) weather station, laser-optical PARSIVEL disdrometer, Precipitation Imaging Package (PIP), and Micro-Rain-Radar (MRR) among other instruments. MRMS and IMERG algorithms utilizing the AIO temperatures are used as references. MRMS and IMERG algorithms utilizing HRRR, ERA5, and NASA’s global modeling and assimilation office (MERRA-2) reanalysis have been evaluated. The phase algorithms of particle size and fall velocity-based PARSIVEL, PIP-derived and MRR-measured Doppler fall speed, and PIP-based bulk and equivalent density provided independent resources for the evaluation of MRMS and IMERG algorithms. The study focused on phase transition events but also included snow events.
-
-
- Exploration of Emergent Technologies In Sustainable Lunar Agricultural Engineering — Alena Zheng (UMCP/UMES)
- Thermal Analysis of the Nancy Grace Roman Space Telescope — Francesca Sciarretta (UMCP/NASA)
- NASA Human Exploration Rover Challenge (HERC) — Ismail Shah (Oxon Hill HS)
- Diamagnetic Loop Diagnostics in CMFX — Justin James (HCC/UMCP)
- Articulated/Segmented Body Lunar Rover with Pivoting Joints — Danny Puwo (UMES/UMCP)
- Evaluation of Precipitation Amount Products in Mid-Atlantic and Southern New England — Amalie Rebstock (UMBC/NASA)
- Radiative Cooling Properties in Cellulose Materials — Bryan Yang (UMBC/UMES)
- New Insulators and Mechanical Supports to Prevent Arcing in CMFX — Ismail Aadan (UMCP)
- Design of an Arc Chamber for Plasma Impedance Matching — Makai Martin (UMES/UMBC)
-
Group Photos, 10:20-10:30 a.m.
Poster Session, 10:30 a.m. – 11:30 a.m.
Exploration of Emergent Technologies In Sustainable Lunar Agricultural Engineering — Alena Zheng (UMCP/UMES)
Smart agriculture employs advanced technologies to improve the productivity and quality of crops while simultaneously reducing labor with autonomous systems. FarmBot, an open-source robotic farming device, can be programmed to assist with planting, watering, and weeding. This advanced agricultural machinery has applications extending beyond Earth to potential space agricultural settings. Our project involves a focus on utilizing the watering aspect of the FarmBot to sustain our set-up of growing spinach with two lunar regolith simulant soils of varying concentrations. The spinach (Spinacia oleracea) plants exhibited the best growth, as indicated by the largest leaf widths, in the 75% regolith simulant concentrations for both types of simulants. This is determined to be due to the appearance of crustose lichen (Rhizocarpon geographicum) in these containers. Another avenue of space farming exploration includes aeroponics, a soil-less growing technique where roots are suspended in air and misted with nutrient-rich water. We are using a Tower Garden, a vertical aeroponic growing apparatus, to test the benefits of aeroponics. Both the FarmBot and Tower Garden are vital, accessible tools with the potential to revolutionize the future of farming from Earth to the Moon. (Click image for full size.)
Thermal Analysis of the Nancy Grace Roman Space Telescope — Francesca Sciarretta (UMCP/NASA)
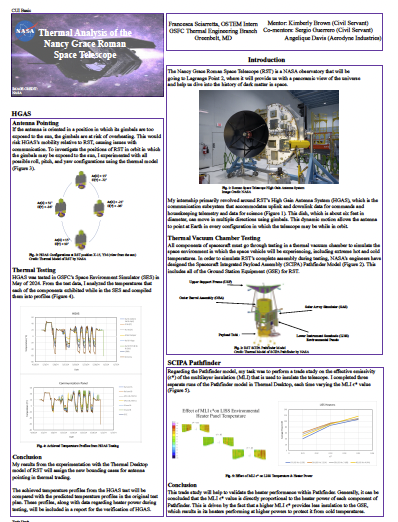
The Nancy Grace Roman Space Telescope (RST) is a NASA observatory that will be stationed in Lagrange Point 2 (L2) orbit, where it will provide us with a panoramic view of the universe, helping to investigate dark matter and exoplanets. During my internship at NASA’s Goddard Space Flight Center (GSFC), I worked on RST’s High Gain Antenna System (HGAS) and performed a trade study on the effects of the effective emissivity (ε*) of multilayer insulation on the Ground Station Equipment (GSE). My work regarding HGAS will be compiled into a test report, and my trade study findings will lead to the verification of RST’s GSE heater performance, both of which are crucial to the overall mission. (Click image for full size.)
NASA Human Exploration Rover Challenge (HERC) — Ismail Shah, Emmanuel Castillo, Elda Berhaneyessus, Michael Perez, Lareon Brent III, Hannah Magruder (Oxon Hill HS)
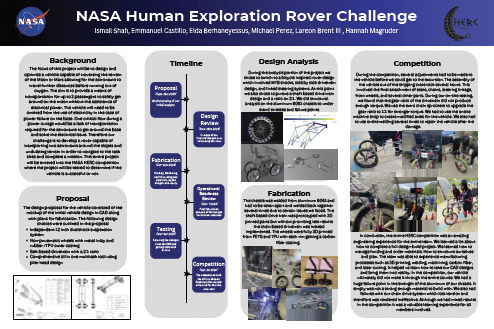
This project focussed on designing and optimizing a vehicle capable of traversing the Moon or Mars terrain, allowing the astronauts to travel further distances before running out of oxygen. The aim was to provide a means of transportation for up to 2 passengers to safely get around on the moon without the assistance of electrical power. The vehicle needed to be omitted from the use of electricity in the case of power failure on the base. One critical flaw during a power outage would be a lack of transportation required for the astronauts to get around the base and solve the electrical issue. Therefore our challenge was to develop a rover capable of transporting two astronauts around the slopes and undulating terrain to navigate to the task sites and complete a mission. This entire project was entered into the NASA HERC competition where the project was tested to determine if the vehicle was successful or not. (Click image for full size.)
Diamagnetic Loop Diagnostics in CMFX — Justin James (HCC/UMCP)
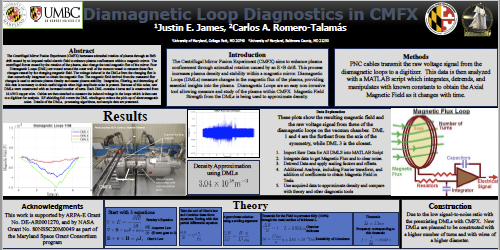
The Centrifugal Mirror Fusion Experiment (CMFX) harnesses azimuthal rotation of plasma through an ExB drift caused by an imposed radial electric field to enhance plasma confinement within a magnetic mirror. The centrifugal forces caused by the rotation of the plasma, also change the total magnetic flux of the mirror. Four Diamagnetic Loops (DML) are wound around the outer wall of the vacuum vessel to measure these flux changes caused by the changing magnetic field. The voltage induced in the DMLs from the changing flux is then numerically integrated to obtain the magnetic flux. The magnetic field derived from the measured flux changes is used to estimate plasma density and assess plasma stability. Integration, filtering, and detrending of this data is necessary to obtain useful signals when high amplitude noise is present. Because of this noise, new DMLs were constructed with an increased number of turns. Each DML contains 4 turns and is constructed from 18 AWG copper wire. Cables are then attached to measure the induced voltage in the loops which is then sent to a digitizer for analysis. RF-shielding foil covers the DML windings to reduce the pick-up of electromagnetic noise. Details of the DMLs, processing algorithms, and sample data are presented. (Click image for full size.)
Articulated/Segmented Body Lunar Rover with Pivoting Joints — Danny Puwo (UMES/UMCP)
During the internship at University of Maryland College Park we created an Articulating Rover as a “body” or testbed for the BIG Ideas project and future projects. The BIG Ideas project is a program where students work with NASA to create innovative and groundbreaking projects. They are currently designing wheels for the Lunar and Martian rover(s), using CAD and testing wheels for traction along with an inflatable devicel, with grousers, to help the rover cover more ground. The Articulating Lunar Rover (Luna) consists of two boxes and rotating joints made of aluminum, 3D printed Models of the BIG Ideas inflatable wheel designs, and a circuit to actuate the wheels. The Arduino Uno is the main part of the circuit which is connected to a joystick (which is tethered to the Rover), and four motors for rotating the wheels. The process of building the project is very rewarding, even though there were some time constraints and limited resources, we gained a lot of experience in programming with an Arduino, and circuitry. (Click image for full size.)
Evaluation of Precipitation Amount Products in Mid-Atlantic and Southern New England — Amalie Rebstock (UMBC/NASA)
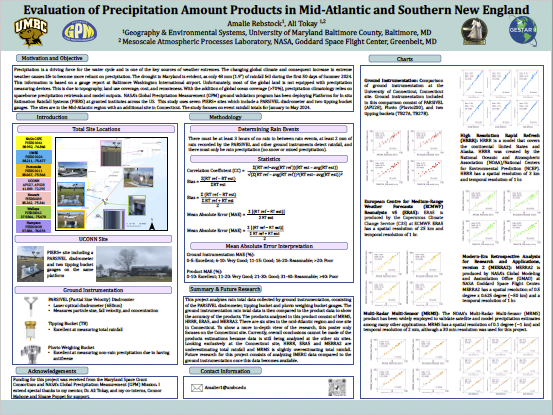
Precipitation is a driving force for the water cycle and is one of the key sources of weather extremes. The changing global climate and consequent increase in extreme weather causes life to become more reliant on precipitation. The drought in Maryland is evident, as only 48 mm (1.9”) of rainfall fell during the first 50 days of Summer 2024.This information is based on a gauge report at Baltimore Washington International airport. Unfortunately, most of the global land is not equipped with precipitation measuring devices. This is due to topography, land use coverage, cost, and remoteness. With the addition of global ocean coverage (>70%), precipitation climatology relies on spaceborne precipitation retrievals and model outputs. NASA’s multi-satellite product, IMERG, operated and funded by the Global Precipitation Measurement (GPM) mission, is widely used in scientific research and operational applications. The NOAA’s Multi-Radar Multi-Sensor (MRMS) product has been widely employed to validate satellite and model precipitation estimates among many other applications.
The GPM ground validation program has been deploying Platforms for In situ Estimation Rainfall Systems (PIERS) at granted institutes across the US. This study uses six PIERS+ sites which include a PARSIVEL disdrometer and tipping bucket gauges. The sites are located in the Mid-Atlantic region with an additional site in Connecticut. Some sites have additional instrumentation, including Pluvio weighing bucket gauge, additional tipping buckets, and additional PARSIVEL disdrometers. The study focuses on event rainfall totals for January to May 2024. The PARSIVEL disdrometer was the reference for the event definition and phase identification, while its rainfall totals compared to the gauges to determine the reference instrument. In addition to MRMS, the performance of the NOAA’s HRRR model, European ERA5 reanalysis, NASA’s MERRA-2 reanalysis were evaluated through comparison to the reference instrument. Future study will be conducted once IMERG data is available. (Click image for full size.)
Radiative Cooling Properties in Cellulose Materials — Bryan Yang (UMBC/UMES)
Radiative cooling properties in certain materials have the potential to reduce the urban heat island effect if applied at scale. An ideal passively cooling material should exhibit properties such that they are simultaneously high in solar reflectance whilst being effective at longwave infrared heat transfer through the atmospheric infrared window. Such properties effectively allow the material to cool passively without consuming electricity. Here, we explore the passive cooling capabilities of various cellulose composites by improving upon an existing experimental setup to determine their cooling power more reliably. (Click image for full size.)

New Insulators and Mechanical Supports to Prevent Arcing in CMFX — Ismail Aadan (UMCP)
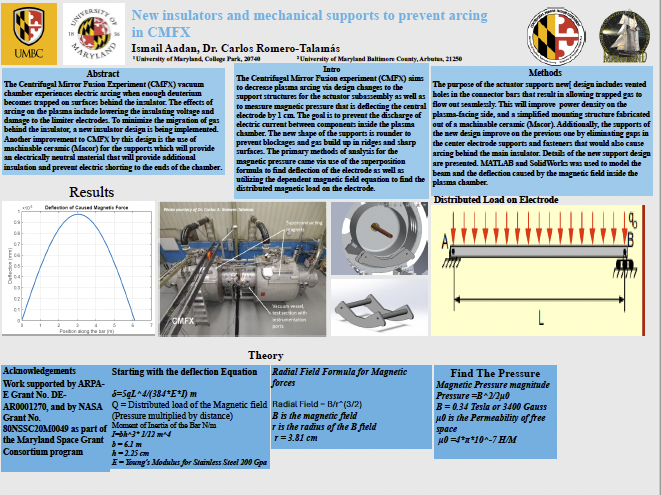
The Centrifugal Mirror Fusion Experiment (CMFX) vacuum chamber experiences electric arcing when enough deuterium becomes trapped on surfaces behind the insulator. The effects of arcing on the plasma include lowering the insulating voltage and damage to the limiter electrodes. To minimize the migration of gas behind the insulator, a new insulator design is being implemented. Another improvement to CMFX by this design is the use of machinable ceramic (Macor) for the supports which will provide an electrically neutral material that will provide additional insulation and prevent electric shorting to the ends of the chamber. (Click image for full size.)
Design of an Arc Chamber for Plasma Impedance Matching — Makai Martin (UMES/UMBC)
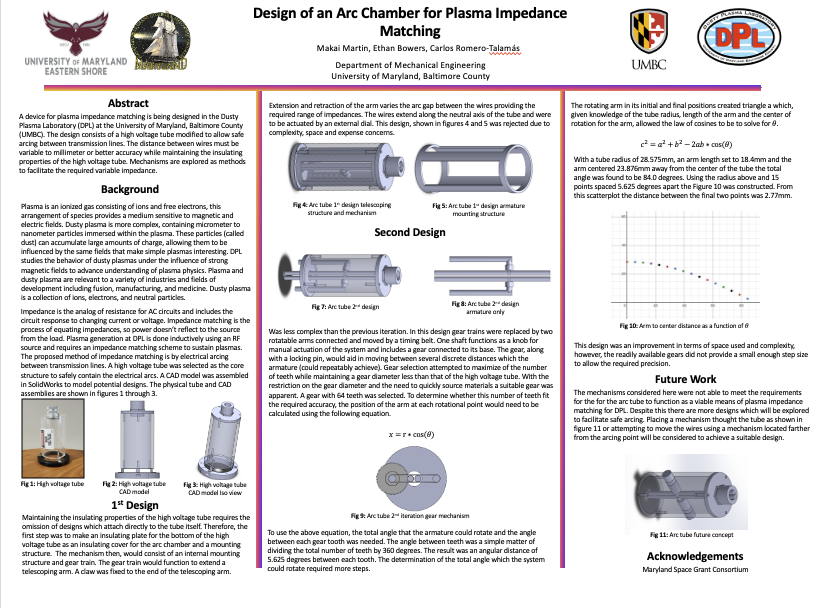
A device for plasma impedance matching is being designed in the Dusty Plasma Laboratory (DPL) at the University of Maryland, Baltimore County (UMBC). The design consists of a high voltage tube modified to allow safe arcing between transmission lines. The distance between wires must be variable to millimeter or better accuracy while maintaining the insulating properties of the high voltage tube. Mechanisms are explored as methods to facilitate the required variable impedance. (Click image for full size.)
Oral Presentation Session 2, 11:30 – 12:55 p.m.
This summer internship project was undertaken at the University of Maryland Eastern Shore (UMES) under the auspices of synergistic projects titled AIRSPACES (Autonomous Instrumented Robotic Sensory Platforms to Advance Creativity and Engage Students) and DREAM (Developing Robotic Exploration with Agrobots and Moonbots) ongoing at the university funded by Maryland Space Grant and NASA-MSTAR program respectively. Autonomous navigation and artificial intelligence integration with the recently acquired Agilex Limo 4-wheeled multi-modal mobile robot equipped with various navigational sensors including LiDAR and stereo depth camera was the primary focus of the project efforts outlined. Limo works with open-source ROS and the Gazebo simulator allowing access to significant reserves of robotic application development capabilities both in virtual and physical domains providing a rich educational and research platform. A specially designed simulation table was also utilized to simplify the process of testing model applications.
Understanding the neural mechanisms associated with cognitive functions such as problem solving and decision making is crucial to the development of a human systems integrative architecture for long-term spaceflight missions. Such neural mechanisms are characterized by unique patterns of communication between brain regions. Therefore, we require robust methods for identifying the level of interaction between the neural activity recorded from different cortical locations (as EEG time series signals). While existing approaches do exist, they may not be enough to provide adequate insight. In this research, we evaluate a new method which is based on computing the similarity between graphs formed from the time series themselves (from a notion of visibility between data points). Initial results suggest that our method is an improvement over some existing approaches, but further investigation is required.
Flight Safety Analysts require tools to accurately carry out analysis for launches out of Wallops Flight Facility. Overtime, these tools become outdated. This summer internship focused on updating the old excel tools to interactive MATLAB Apps. These apps increase efficiency and allow more detailed risk-based assessment by Safety Analysts.
Long-duration space missions can lead to numerous upper airway issues for astronauts, potentially impacting their health and mission performance. Nasal drug sprays offer a promising solution to these problems. This project aims to investigate the suitability of over-the-counter nasal drug sprays for use in space. Using Computational Fluid Dynamics (CFD), we will model the droplet transportation of drug sprays under zero gravity conditions to evaluate their effectiveness and behavior in a microgravity environment. Additionally, we will investigate the contributing parameters that can assist in increasing the efficacy of these drug sprays in reaching a target location within the nasal passage. This will allow for an individualized nasal spray delivery system for each astronaut..
Consider autonomous agents in an unknown environment with very limited communication. They must leverage what limited information about the environment they can send to aid in an agent’s objectives. In our project, we explore the use of bounding hulls to reduce the necessary data needed for a sampling-based motion planning algorithm to reconstruct a path in minimal time. We consider three different map types (zig-zag, maze, forest) and the number of vertices in each constructed bounding hull. Our findings indicate that a bounding hull of as low as 4 vertices can significantly reduce the time it takes for another agent to reconstruct a path using RRT*.
USNA STEM is an organization that strives to increase the pursuit of STEM-based careers by directly teaching hands-on STEM learning modules to students and teachers alike. I spent my summer observing and helping USNA STEM, learning how hands-on activities can benefit me as a student and an engineer.
Thermal management is crucial for ensuring the dependability and safety of space exploration missions. The extreme temperature fluctuations encountered during rocket launch, reentry, and in the vacuum of space pose significant risks to the lives of astronauts and the proper functioning of onboard equipment. Without proper thermal insulation, with temperatures exceeding 1600°C during atmospheric passage and plummeting to -270°C in space, the structural integrity of spacecraft is severely compromised. This research explores the potential development of an aerogel-based, novel thermally insulated paint designed to offer superior insulation properties. By reducing material weight and volume to effectively mitigate heat transfer, this innovative coating enhances the survivability of spacecraft. Additionally, the potential applications of this technology extend beyond aerospace, presenting a promising solution to global thermal challenges across various industries.
This study, conducted at Morgan State University, aims to analyze various nose cones with different lengths, shapes, and materials to determine which variation meets certain apogee, aerodynamic, and structural conditions. These conditions were calculated, modeled, and simulated to exhibit positive behavior during liftoff. The research was supported by the Base 11 award to build a Liquid Propellant Rocket (LPR) in 2020. Before analyzing the cones, familiarity with the software used throughout the study was essential to accurately interpret the results. The software includes OnShape, OpenRocket, and Autodesk Inventor. Initially, OnShape was used to plan the 3D modeling of the cone after gathering the dimensions from simulations. OpenRocket was then used to determine the necessary length, shape, material, and average apogee value by running various simulations with different nose cone configurations. After modeling and simulating the optimal cone variation, an experiment was conducted using Inventor due to its ability to do pressure analysis. The results from this experiment suggest that analyzing various nose cones with different parameters allows for accurate anticipation of rocket deployment, stability, and the ability to reduce aerodynamic drag and control airflow. This study will demonstrate these findings.