
We plan to be open from approximately 6:30-8:30 pm to view the “parade of planets”. Hope you can join us!
April 8, 2024: Solar Eclipse

On Monday, April 8th, 2024, the Moon crossed in front of the Sun as seen from much of North America, giving millions of Americans another chance to experience a solar eclipse. Like in October 2023 and August 2017, Maryland experienced a partial solar eclipse. During a partial eclipse the Sun is never fully blocked by the Moon. This means that it is never safe to look directly at a partial eclipse without special eye protection — regular sunglasses are not okay! Please see below for more information on safe observing practices.
From Maryland, the beginning of Monday’s eclipse (aka “first contact”) was be at approximately 2:05 p.m. according to timeanddate.com, depending slightly on the viewer’s location. Maximum eclipse depth of approximately 90% coverage occurred at 3:21 p.m. and the show was all over at around 4:30 p.m.
For eclipse watchers in the Baltimore area, a couple of opportunities to come out (or stay in) and see the spectacle were:
-
- On JHU’s Homewood campus – weather permitting – free! Here are some photos from the day.
- At the Maryland Science Center – with paid admission or membership.
- NASA’s online broadcast – free!
Eclipse safety: It is very important not to look at the partial eclipse directly unless you have appropriate eye protection such as special eclipse glasses (NOT regular sunglasses) from a reputable manufacturer. Courtesy of NASA, here is a summary of information about eclipse safety. Key takeaways: either use special eclipse glasses or use an indirect viewing method, such as a projected image from a pinhole camera.
While Maryland experienced only a partial eclipse, a swath of the USA stretching from Texas to New England briefly fell into darkness as the Moon fully covered the Sun, creating the fateful (and amazing) condition known as a total eclipse. The image below shows the approximate locations where this occurred; for more detail see NASA’s Where & When.

To all eclipse watchers, we wish you clear skies!
A visualization of stellar open clusters
Have you ever wished you could venture beyond Earth and explore among the stars? We certainly have. Alas, for the time being such explorations remain in the domain of imagination and science fiction. However, thanks to the precision of modern stellar catalogs, we can map the nearby stars and render their positions on your computer screen, allowing you to explore among them from the comfort of home! Click to access one such stellar visualization, created by MDSGC volunteer M. Prem. The accompanying text explains what is displayed and how it works. Have questions? Please email us at mdsgo@jhu.edu.
Preserving Dark Skies for Astronomy

Happy April! International Dark Sky Week is coming up later this month. We are delighted to invite you to attend a special two-part event in celebration of dark skies!
- 4/15/22 @ 7pm ET – Dark Skies Presentation: Join us on Friday, April 15th at 7pm in room 361 of the Bloomberg Center for Physics and Astronomy (Johns Hopkins University Homewood Campus). Dr. Sarah Marie Bruno (JHU), cosmologist, will discuss the impact of satellite constellations on ground-based astronomy, and the importance of preserving dark skies for astronomy and beyond. Light refreshments will be served directly following the talk.
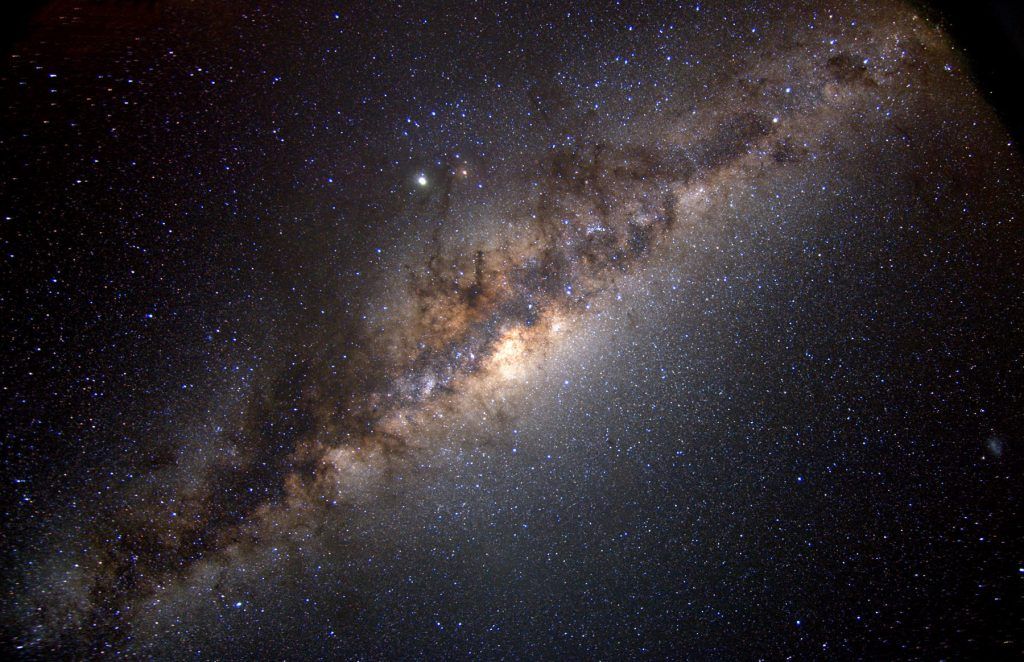
Preserving Dark Skies for Astronomy: The starry night sky has inspired humanity from the dawn of our history. However, the night sky we can see from Baltimore in 2022 looks vastly different from the skies that Galileo Galilei observed with his telescope or the skies that inspired the star stories of indigenous peoples in North America. Artificial lighting from ground-based sources and reflections off satellites can impact astronomy and impede our ability to witness the natural beauty of the skies. The Milky Way, once a fixture of human experience, is now hidden from view for over two thirds of the world’s population. Sadly, light pollution is only getting worse with the increasing number of commercial satellites flooding low-Earth orbits. While satellite constellations such as SpaceX’s Starlink will likely boost the global economy and increase internet accessibility worldwide, they will introduce additional light pollution and foreground contamination which may greatly impede astronomical observations from the ground. Specifically, solar reflections, radio frequency transmission, and thermal emission will impact ground-based astronomy in the optical, radio, and microwave frequencies, respectively. Bruno wilI (1) discuss the projected impact of the growing space industry on the field of astronomy, (2) present proposed strategies for mitigating these effects, and (3) reflect on the importance of preserving the dark sky environment not only for astronomy, but for human health and wellbeing.
- 4/15/22 @ 8:30pm ET – Observatory Open House: After Dr. Bruno’s talk, we will migrate up to the roof of the Bloomberg building for an observatory open house. We expect that observing will be possible beginning around 8:30pm. We will use the telescope in the observatory to view the stars and planets and an additional smaller telescope on the roof to observe the Moon. Join us in celebrating the beautiful dark skies above Johns Hopkins campus!
Please note that due to space limitations on the Bloomberg roof, this event is restricted to the first 50 registrants. Please sign up here to attend.
The event is free to attend and free parking will be available on the Upper Muller Lot (located next to the Bloomberg building and accessible off of San Martin Drive.)
Note: This event (both talk and observatory night) is subject to rescheduling depending on the weather. The following Friday (4/22) is a backup day. Registered attendees will receive an email by the evening of April 14th confirming whether the event will take place April 15th or be postponed to April 22nd.
Next Open House
Hoping the clouds will hold off, we’ll be open from approximately 8:30-10:30 tonight.
Interactive Astrophysics Stories
At the MDSGC Observatory, we’re always looking to share our enthusiasm about the Universe and its many fascinating phenomena. Therefore, we’re pleased to present this short series of interactive online astrophysics stories!
#4: Detecting Exoplanets via Transits
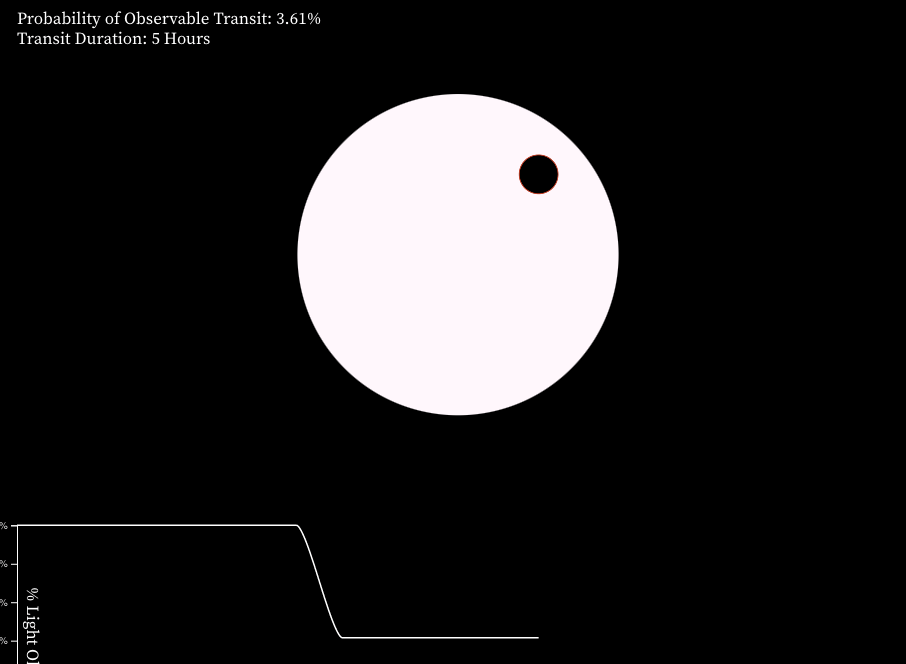
Since the first discoveries starting in the 1990s (see post below), the continued search for new exoplanets and the study of their properties has grown into a major area of astronomical research. As additional effort has been invested and new technologies have been developed, the primary techniques for finding and characterizing new exoplanets have also evolved. Follow this link over to our Exoplanet Transits story at ObservableHQ to learn about how astronomers have discovered most of the exoplanets we now know — and where we’re still looking to improve our knowledge!
#3: Hot Jupiter Systems
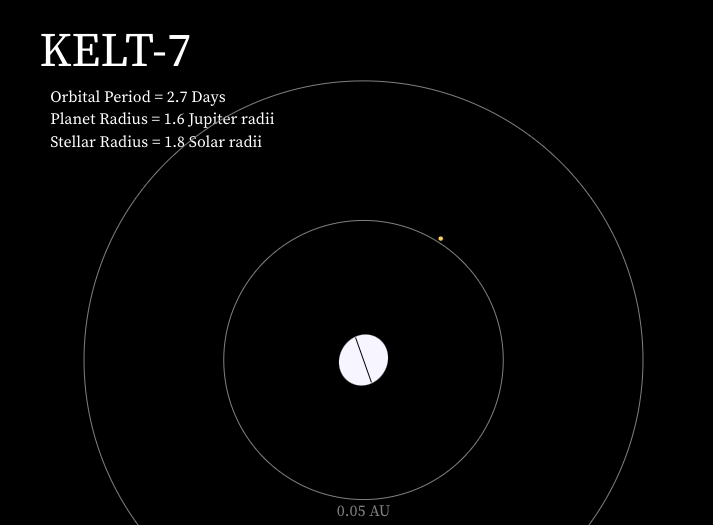
Until the 1990s, the only planets known to science were the nine* of our own solar system. As technology progressed and astronomers began to focus their efforts on looking for planets around other stars, they received several great surprises in the form of just how different the first discovered “exoplanet” systems were, compared to ours. In the decades since, intense efforts have revealed a more detailed picture, and we now understand planetary systems to be a widespread if not universal phenomenon — as astronomers had hoped all along. But the earliest discovered systems continue to play an important role in our new understanding. Follow this link over to our Hot Jupiter story at ObservableHQ to learn more!
(*Those were the days, eh, Pluto?)
#2: Imaging a Star Cluster

When it comes to practical astronomy, whether we’re idly admiring the night sky or concentrating closely on a telescopic view, star clusters are some of the most interesting things up there. The image above shows a portion of the star cluster Messier 67 obtained from our Observatory. (Another prime example of a star cluster is also one of the Fall sky’s highlights: the Pleiades, or Seven Sisters.) So what, apart from simple visual appeal, makes star clusters interesting for astronomers?
Follow this link over to our interactive Star Cluster Image story at ObservableHQ to learn more!
#1: The Earth-Moon System
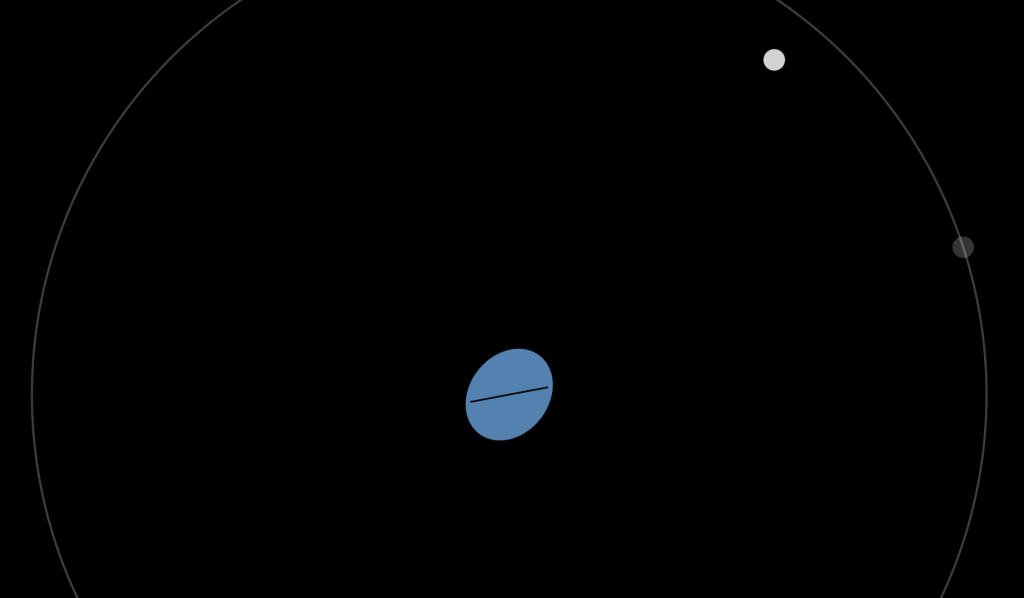
It was Fall as we wrote this, and in Earth’s northern hemisphere the days were getting shorter. DayLIGHT, that is! But did you know that actually, the length of Earth’s day is increasing as time goes on? What’s that all about, and what in the Universe could be responsible?
Follow this link over to our interactive Earth-Moon System story at ObservableHQ to find out!
After reading, send us your questions and let us know what you think at mdsgo@jhu.edu!
Observe the Moon

While most of our attention may understandably be consumed by events taking place here on planet Earth, it’s a good practice to pause occasionally and take in a larger perspective. A fine occasion for such activity presents itself whenever clear skies align with favorable Moon phases.
Each year, International Observe the Moon Night, marked in 2020 on Saturday, September 26th, encourages Earthlings to point our gazes skyward and appreciate our closest celestial neighbor. (NASA organizes a list of events that might allow for an in person experience, as well as ways to participate from home.)
The first quarter lunar phase each month is widely considered to be best for viewing because of its evening visibility and the oblique angle of sunlight that throws its surface details into sharp relief. When looking at the Moon from Earth, we definitely recommend grabbing a pair of binoculars, if available, as any amount of magnification greatly enhances the visibility of surface features such as craters.
And while you’re thinking about gazing skyward, don’t forget to think about other ways to get your astronomy fix, and be sure to check out Sky & Telescope’s Sky at a Glance for more detail about what’s on the celestial menu these days.
Astronomy during the pandemic
While the MDSGC Observatory remains closed for the time being, with a little inspiration and effort we can still admire the night sky above us — and certainly now, as much as ever, we can all benefit from a cosmic perspective!
Here is a recent article by University of Arizona astronomer professor Chris Impey on ways to enjoy astronomy during the pandemic. It’s a must read for would be backyard astronomers. Of special note is the “Sky at a Glance” from Sky & Telescope, a highly useful guide to tracking the Moon, planets, and other noteworthy celestial events.
Another recommended activity that may be appealing is to construct a planisphere: a device that shows the locations of the stars in the sky each night. You can buy one, of course, or use free astronomy software such as Stellarium, but if you happen to live at a latitude not too different from Baltimore, MD (39.29 degrees North) and have access to a printer, you can also make your own using these files: planisphere instructions and planisphere cutouts. The second file has two pages, which need to be printed on separate sheets of paper. You’ll also need a paperclip.
Until we can once again welcome you to visit our Observatory, happy star-gazing!
Public Events Cancelled
Based on official guidance from JHU, public Observatory events are suspended until further notice.
Mercury on the Face of the Sun: 11/11/19
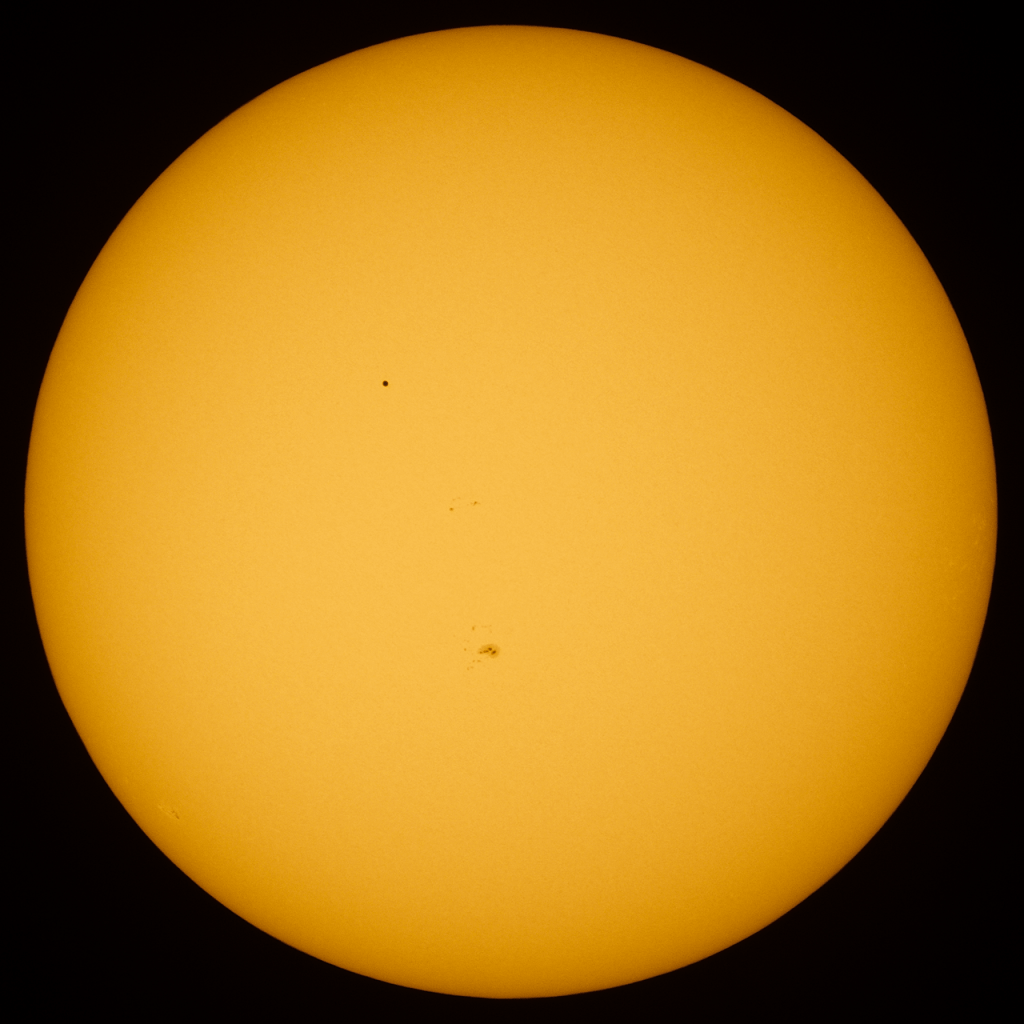
On November 11, 2019, tiny planet Mercury crossed between Earth and the Sun. Observers fortunate enough to be beneath clear skies on the sunward side of the Earth when this happens could hope to view the celestial conjunction, officially known as a transit. Transits of Mercury occur about a dozen times per century. The most recent was in 2016, and the next is in 2032! (In 2032 the transit will not be visible from North America.)
Mercury is quite small, so eclipse glasses are not sufficient to see it. Properly configured solar binoculars, or ideally a high magnification solar telescope, are needed. Always use caution when observing the Sun!
Thanks to those who came up to join us at the Maryland Space Grant Observatory, as we trained our telescopes to follow the transit from approximately 9:00 a.m. — 1:00 p.m. EST. Here is a NASA video showing the full transit:
For more information about the 11/11/2019 Mercury transit, check out this page from NASA JPL or this very detailed page at EclipseWise.com.